LabRat - Autonomous search and rescue robot
One of the classes that I took while earning my Master’s Degree at CMU wasHardware for Software Engineers instructed by Professor Anthony Lattanze. Not only was the class well taught, but the final project was a blast.
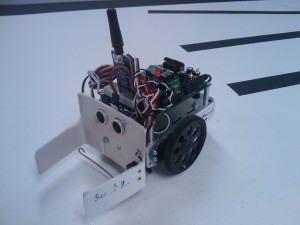
The LabRat is an autonomous robot designed by John Peabody Jr and Krishna Ersson to complete a search-and-rescue challenge. On a 4′ x 6′ game board, the LabRat was designed and programmed to autonomously locate pylons, randomly placed, and return the pylons to the home square.
Using a Parallax BASIC stamp, a Parallax PING))) Ultrasound sensor, a Parallax 433 MHz RF Transceiver, and three Parallax QTI sensors; the LabRat continuously pings for pylons on the game board. Once a pylon is detected the LabRat approaches the pylon and attempts to dock with it. Using a simple bump switch, the LabRat can verify a successful dock maneuver with the pylon. Once I pylon is successfully docked, the LabRat utilizes the three QTI sensors in combination with custom maneuvering algorithms to return the pylon to the home zone with line detection.
A complete presentation by Team LL-Ohmbres is provided HERE for more information.